角点检测(Corner Detection)也称为特征点检测,是图像处理和计算机视觉中用来获取图像局部特征点的一类方法,广泛应用于运动检测、图像匹配、视频跟踪、三维建模以及目标识别等领域中。
局部特征
不同于HOG、LBP、Haar等基于区域(Region)的图像局部特征,Harris是基于角点的特征描述子,属于feature detector,主要用于图像特征点的匹配(match),在SIFT算法中就有用到此类角点特征;而HOG、LBP、Haar等则是通过提取图像的局部纹理特征(feature extraction),用于目标的检测和识别等领域。无论是HOG、Haar特征还是Harris角点都属于图像的局部特征,满足局部特征的一些特性。主要有以下几点:
- 可重复性(Repeatability):同一个特征可以出现在不同的图像中,这些图像可以在不同的几何或光学环境下成像。也就是说,同一物体在不同的环境下成像(不同时间、不同角度、不同相机等),能够检测到同样的特征。
- 独特性(Saliency):特征在某一特定目标上表现为独特性,能够与场景中其他物体相区分,能够达到后续匹配或识别的目的。
- 局部性(Locality);特征能够刻画图像的局部特性,而且对环境影响因子(光照、噪声等)鲁棒。
- 紧致性和有效性(Compactness and efficiency);特征能够有效地表达图像信息,而且在实际应用中运算要尽可能地快。
相比于考虑局部邻域范围的局部特征,全局特征则是从整个图像中抽取特征,较多地运用在图像检索领域,例如图像的颜色直方图。
除了以上几点通用的特性外,对于一些图像匹配、检测识别等任务,可能还需进一步考虑图像的局部不变特征。例如尺度不变性(Scale invariance)和旋转不变性(Rotation invariance),当图像中的物体或目标发生旋转或者尺度发生变换,依然可以有效地检测或识别。此外,也会考虑局部特征对光照、阴影的不变性。
Harris角点检测
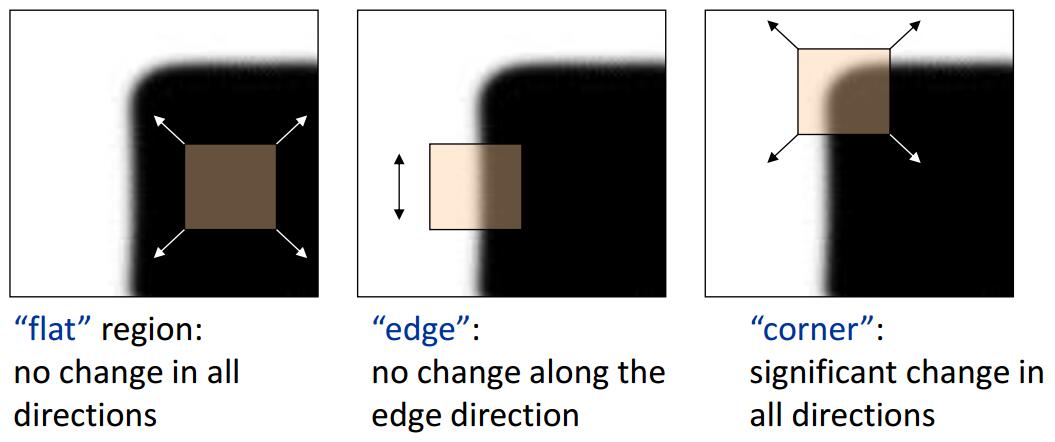
特征点在图像中一般有具体的坐标,并具有某些数学特征,如局部最大或最小灰度、以及某些梯度特征等。角点可以简单的认为是两条边的交点,比较严格的定义则是在邻域内具有两个主方向的特征点,也就是说在两个方向上灰度变化剧烈。如下图所示,在各个方向上移动小窗口,如果在所有方向上移动,窗口内灰度都发生变化,则认为是角点;如果任何方向都不变化,则是均匀区域;如果灰度只在一个方向上变化,则可能是图像边缘。
对于给定图像$I(x,y)$和固定尺寸的邻域窗口,计算窗口平移前后各个像素差值的平方和,也就是自相关函数
$$E(u,v)=\Sigma_x\Sigma_yw(x,y)[I(x+u,y+v)-I(x,y)]^2$$
其中,窗口加权函数$w(x,y)$可取均值函数或者高斯函数,如下图所示:

根据泰勒展开,可得到窗口平移后图像的一阶近似
$$I(x+u,y+v)\approx I(x,y)+I_x(x,y)u+I_y(x,y)v$$
因此$E(u, v)$可化为
$$E(u,v) \approx \Sigma_{x,y}w(x,y)[I_x(x,y)u+I_y(x,y)v]^2=\left[u,v\right] M(x,y) \left[ \begin{matrix} u\\ v\end{matrix} \right]$$
$$M(x,y)=\Sigma_w \left[ \begin{matrix} I_x^2& I_xI_y \\ I_xI_y & I_y^2\end{matrix} \right] = \left[ \begin{matrix} A& C\\ C& B\end{matrix} \right]$$
$E(u,v)$可表示为一个二次项函数
$$E(u,v)=Au^2+2Cuv+Bv^2$$
其中$A=\Sigma_w I_x^2, B = \Sigma_w I_y^2, C=\Sigma_w I_x I_y$
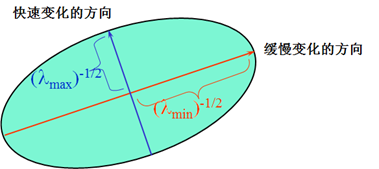
二次项函数本质上是一个椭圆函数,椭圆的曲率和尺寸可由$M(x,y)$的特征值$\lambda_1,\lambda_2$决定,椭圆方向由$M(x,y)$的特征向量决定,椭圆方程和其图形分别如下所示:
$$\left[u,v\right] M(x,y) \left[ \begin{matrix} u\\ v\end{matrix} \right] = 1$$
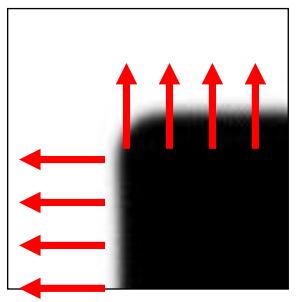
考虑角点的边界和坐标轴对齐的情况,如下图所示,在平移窗口内,只有上侧和左侧边缘,上边缘$I_y$很大而$I_x$很小,左边缘$I_x$很大而$I_y$很小,所以矩阵$M$可化简为
$$M=\left[ \begin{matrix} \lambda_1& 0\\ 0& \lambda_2\end{matrix} \right]$$
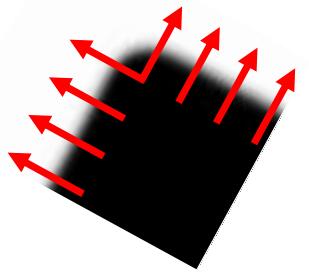
当角点边界和坐标轴没有对齐时,可对角点进行旋转变换,将其变换到与坐标轴对齐,这种旋转操作可用矩阵的相似对角化来表示,即
$$M=X\Sigma X^T = X \left[ \begin{matrix} \lambda_1& 0\\ 0& \lambda_2\end{matrix} \right] X^T$$
$$Mx_i=\lambda_i x_i$$
对于矩阵$M$,可以将其和协方差矩阵类比,协方差表示多维随机变量之间的相关性,协方差矩阵对角线的元素表示的是各个维度的方差,而非对角线上的元素表示的是各个维度之间的相关性,在PCA(主成分分析)中,将协方差矩阵对角化,使不同维度的相关性尽可能的小,并取特征值较大的维度,来达到降维的目的。类似的,可以将矩阵$M$看成是一个二维随机分布的协方差矩阵,通过将其对角化,求取矩阵的两个特征值,并根据这两个特征值来判断角点。
如下图所示,可根据矩阵$M$的特征值来判断是否为角点,当两个特征值都较大时为角点(corne),一个特征值较大而另一个较小时则为图像边缘(edge),两个特征值都较小时为均匀区域(flat)。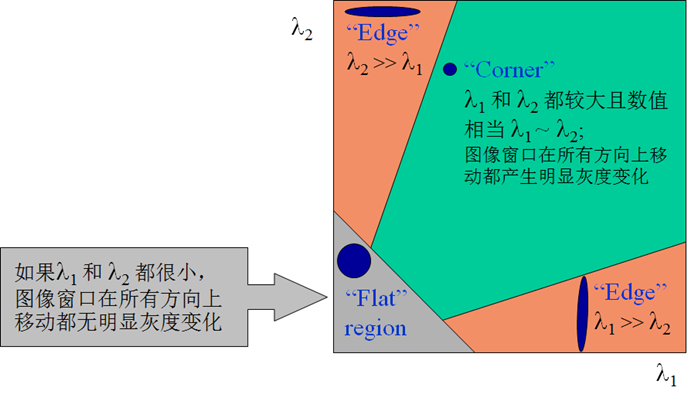
在判断角点时,无需具体计算矩阵$M$的特征值,而使用下式近似计算角点响应值。
$$R = detM-\alpha (traceM)^2$$
$$detM=\lambda_1 \lambda_2=AB-C^2$$
$$traceM=\lambda_1 + \lambda_2 = A+B$$
式中,$detM$为矩阵$M$的行列式,$traceM$为矩阵$M$的迹,$\alpha$为一常数,通常取值为0.04~0.06。
算法实现
Harris角点检测的算法步骤归纳如下:
- 计算图像$I(x,y)$在$X$方向和$Y$方向的梯度
$$I_x=\dfrac {\partial I} {\partial x}=I(x,y)\otimes \left( \begin{matrix} -1& 0& 1\end{matrix} \right)$$
$$I_y=\dfrac {\partial I} {\partial y}=I(x,y)\otimes \left( \begin{matrix} -1& 0& 1\end{matrix} \right)^T$$ - 计算图像两个方向梯度的乘积$I_x^2、I_y^2、I_x I_y$
- 使用窗口高斯函数分别对$I_x^2、I_y^2、I_x I_y$进行高斯加权,生成矩阵$M$。
- 计算每个像素的Harris响应值$R$,并设定一阈值$T$,对小于阈值$T$的$R$置零。
- 在一个固定窗口大小的邻域内($5 \times 5$)进行非极大值抑制,局部极大值点即为图像中的角点。
Harris角点性质
1.参数$\alpha$对角点检测的影响:增大$\alpha$的值,将减小角点响应值$R$,减少被检测角点的数量;减小$\alpha$的值,将增大角点响应值$R$,增加被检测角点的数量。
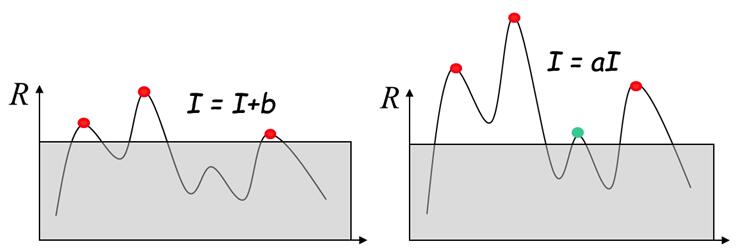
2.Harris角点检测对亮度和对比度的变化不敏感。
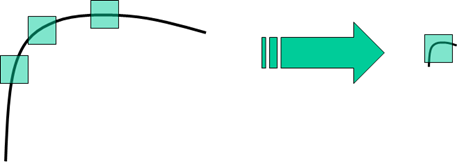
3.Harris角点检测具有旋转不变性,但不具备尺度不变性。如下图所示,在小尺度下的角点被放大后可能会被认为是图像边缘。
Harris角点检测的结果示意图:

多尺度Harris角点检测
Harris角点具有灰度不变性和旋转不变性,但不具备尺度不变性,而尺度不变性对于图像的局部特征来说至关重要。将Harris角点检测算子和高斯尺度空间表示相结合,可有效解决这个问题。与Harris角点检测中的二阶矩表示类似,定义一个尺度自适应的二阶矩
$$M=\mu (x,y,\sigma_I, \sigma_D)=\sigma_D^2g(\sigma_I) \otimes \left[ \begin{matrix} L_x^2(x,y,\sigma_D)& L_xL_y(x,y,\sigma_D)\\ L_xL_y(x,y,\sigma_D)& L_y^2(x,y,\sigma_D)\end{matrix} \right]$$
式中,$g(\sigma_I)$表示尺度为$\sigma_I$的高斯卷积核,$L_x(x,y,\sigma_D)$和$L_y(x,y,\sigma_D)$表示对图像使用高斯函数$g(\sigma_D)$进行平滑后取微分的结果。$\sigma_I$通常称为积分尺度,是决定Harris角点当前尺度的变量,$\sigma_D$为微分尺度,是决定角点附近微分值变化的变量,通常$\sigma_I$应大于$\sigma_D$。
算法流程:
- 确定尺度空间的一组取值$\sigma_I=(\sigma_0, \sigma_1, \sigma_2,…, \sigma_n)=(\sigma, k\sigma, k^2\sigma,…, k^n\sigma), \sigma_D=s\sigma_I$
- 对于给定的尺度空间值$\sigma_D$,进行角点响应值的计算和判断,并做非极大值抑制处理
- 在位置空间搜索候选角点后,还需在尺度空间上进行搜索,计算候选点的拉普拉斯响应值,并于给定阈值作比较
$$F(x,y,\sigma_n)=\sigma_n^2|L_{xx}(x,y,\sigma_n)+L_{yy}(x,y,\sigma_n)| \geq threshold$$ - 将响应值$F$与邻近的两个尺度空间的拉普拉斯响应值进行比较,使其满足
$$F(x,y,\sigma_n) > F(x,y,\sigma_l), l=n-1, n+1$$
这样既可确定在位置空间和尺度空间均满足条件的Harris角点。
reference
- Paper: A COMBINED CORNER AND EDGE DETECTOR
- Paper: Scale & Affine Invariant Interest Point Detectors
- Code: Harris Detector
- http://www.cnblogs.com/ronny/p/4009425.html
- http://www.cnblogs.com/ronny/p/3886013.html
- https://xmfbit.github.io/2017/01/25/cs131-finding-features/
- http://www.voidcn.com/blog/app_12062011/article/p-6071346.html
- http://blog.csdn.net/jwh_bupt/article/details/7628665
- http://www.cnblogs.com/ztfei/archive/2012/05/07/2487123.html